Полетный контроллер OpenPilot
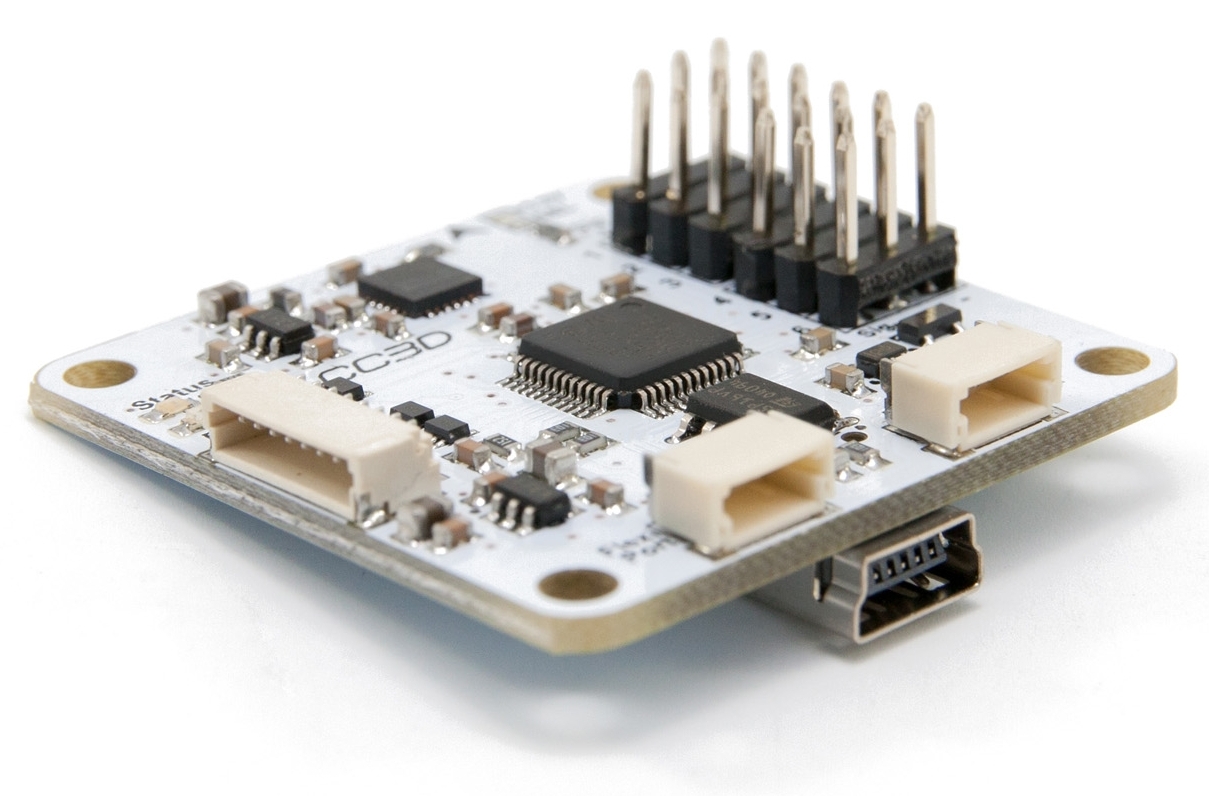

OpenPilot CopterControl3D (CC3D) - упрощенный одноплатный вариант полетного контроллера для мультикоптеров. Количество функций контроллера более чем достаточно для полноценного пилотируемого полёта, в том числе самовыравнивание. Разработан специально для квадрокоптеров 200/250/300 размера.
Комплект поставки:
Полетный контроллер 1шт.
Провода 1 компл.
Корпус 1шт.
Технические характеристики:
32-битный микроконтроллер STM32 (128 кБ Flash памяти и 20 кБ оперативной памяти)
3-осевой высокопроизводительный MEMS гироскоп и 3-осевой MEMS акселерометр MPU-6000
Поддержка ПО Windows, Mac и Linux для конфигурации контроллера
Поддержка USB и отсутствие необходимости установки драйверов
Поддержка сателитов Spektrum
Поддержка системы Futaba S/BUS
Технология Flexi-port
4 МБ энергонезависимой памяти EEPROM для хранения настроек
Поддержка основных радиовходов: 6 каналов PWM, PPM, Spektrum/JR DSM2, DSMJ, DSMX, приемники Futaba S.Bus
Поддержка нескольких приемников одновременно
Функции ReceiverPort (настраиваемые): 6 входных каналов PWM или PPM, 4 выходных канала PWM
Функции MainPort (настраиваемые): телеметрия (по умолчанию), GPS, S.BUS, сателиты Spektrum/JR
Функции FlexiPort (настраиваемые): телеметрия, GPS, сателиты Spektrum/JR, периферийные устройства I2C (в разработке)
10 выходов PWM для сервоприводов или ESC либо для стабилизации камеры
Стабилизация камеры: поддержка 3-осевых подвесов с поддержкой стабилизации и ручного управления
Дополнительный фильтр, работающий на частоте 500 Гц
Размеры 36х36 мм, вес 5.7 гр. (без проводов и корпуса)
FAQ
![]()
CC3D не получается откалибровать
Причина может быть в применении неподходящей антивиброплиты. Контролер должен стоять на нейлоновых стойках или на двустороннем скотче. То есть контролер должен крепко сидеть на раме.
![]()
Как изменить направление вращение моторов в CC3D?
В настройках контроллера - никак. Направление вращения изменяется переключением любых двух из трёх проводов между мотором и регулятором. Направление вращения (какие провода к каким подключать) лучше узнать заранее, т.к. вместо разъёмов рекомендуется пайка напрямую к регуляторам.
![]()
При установки на коптер не хватает места
Это распространенная проблема, но есть решение: к примеру, в программе настройки развернуть по рудеру на 90° или на -90°.
![]()
Есть ли у CC3D функция возврата домой по GPS?
Вообще-то нет. Но есть неофициальные прошивки Harakiri и iNav, которые поддерживают CC3D, они могут работать с модулем GPS и компасом, обеспечивая удержание позиции и автовозврат.
![]()
Для чего есть опция Zero gyros while arming aircraft?
Опцию Zero gyros while arming aircraft в настройках Attitude настоятельно рекомендуется держать в активном состоянии. Эта опция отвечает за калибровку гироскопа и она может избавить от множества проблем. В OpenPilot (CC3D), в отличии от CleanFlight, при включении питания коптера гироскоп калибруется просто усреднением последних показаний. Поэтому, если после подачи питания не поставить коптер на землю и не подождать пока откалибруются гироскопы, а начать закреплять батарею или вертеть аппарат - гироскопы откалибруются некорректно, и вскоре после взлета весьма вероятно падение. А если опция установлена, то перед армингом будет повторная калибровка гироскопов, и полёт пройдет как нужно, но при этом лучше не пытаться армить коптер в руках.
![]()
Как в CC3D сбросить все настройки?
По умолчанию при старте визарда предлагается прошивка со сбросом настроек. Чтобы оставить текущие настройки нужно снять галочку на первой страничке визарда.
![]()
Как использовать барометр и компас?
Бародатчик и магнитометр будет работать с прошивкой CleanFlight. С прошивками OpenPilot и LibrePilot барометр и компас работать не будут.