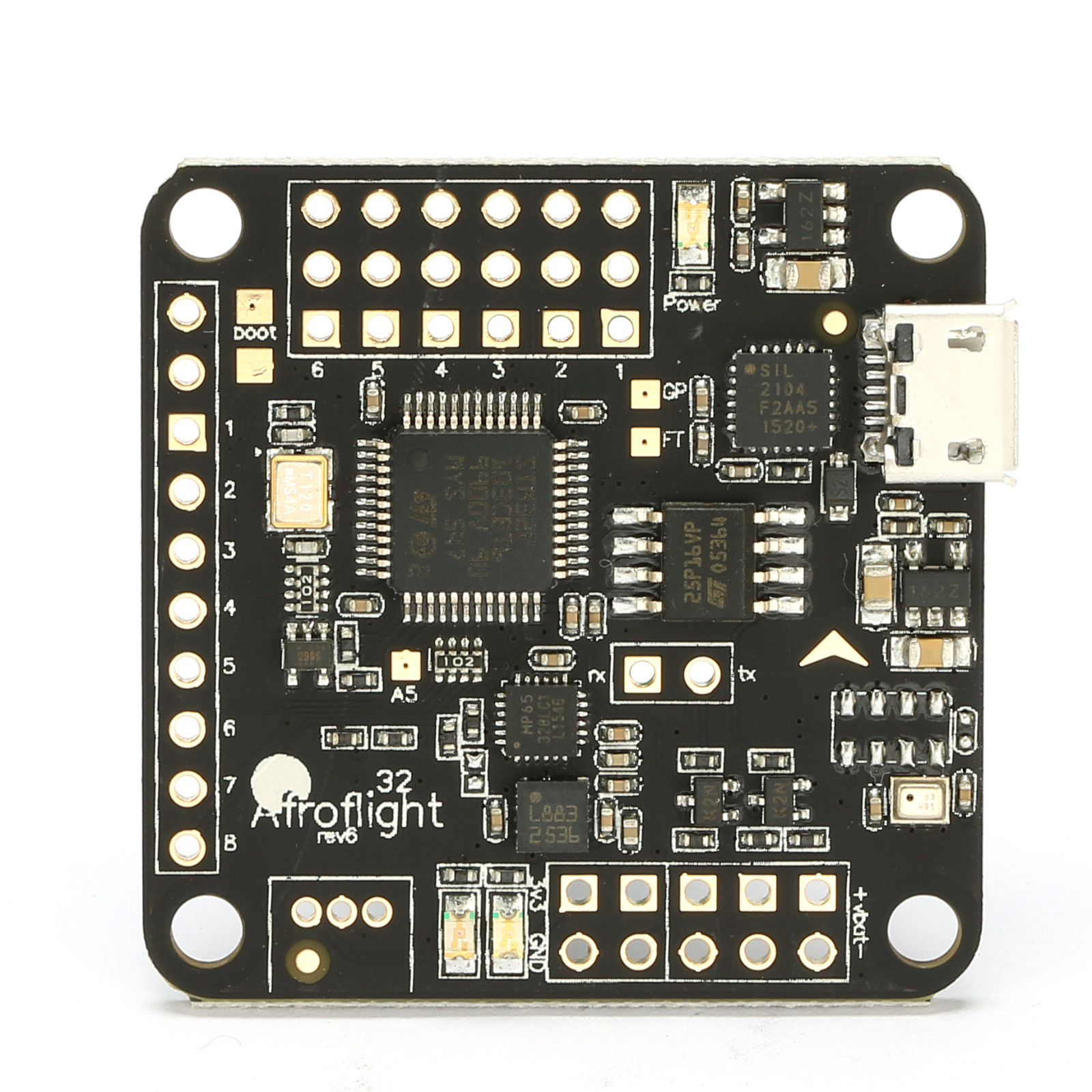
Naze32 Полетный контроллер

• Настраивамые выходы на моторы. Поддерживаются следующие типы:
Квадро/Гекса/Три/Би/Y4/Y6/Окто/Стабилизация камеры. (По умолчанию - Х-Квадрокоптер (Quad-X))
• До 8 входных радиоканалов. Поддерживаются стандартные приемники (РРМ), приемники типа PPM Sum (FrSky, например), а также приемники-сателиты Spektrum.
• Встроенный инвертор телеметрии FrSky (совместно с основным портом)
• Контроль напряжения батареии
• Современный 32-битный процессор, запущенный на 3.3В/72МГц (STM32F103CB).
• Бортовой разъем MicroUSB для настройки и конфигурации
• Яркие светодиоды на борту*
• Совместимое с MultiWii програмное обеспечение для легкой настройки
• Версия платы - 10DOF
Baro датчик: BMP280
IMU датчик: MPU6500
MAG датчик: HMC5883
Характеристики:
Габариты: 36x36 мм (30.5мм между монтажными отверстиями)
Вес: 5.3г (с разъемами - 7.3г)
Датчики: Трехосевой MEMS гироскоп 2000 град./сек + акселерометр (MPU6050)
Входное напряжение: 16В (макс.) для входных сигналов и 35В (макс.) для линии контроля напряжения батареи